حسگرهای نیرو، استرس مکانیکی و لمسی
در سیستم SI اصلیواحدها جرم، طول و زمان و نیرو و شتاب هستند مشتقاتواحدها در سیستم واحدهای بریتانیا و آمریکا، واحدهای اساسی نیرو، طول و زمان هستند. واحد نیرو یکی از کمیت های فیزیکی اساسی است. نیروها در طول تحقیقات مکانیکی، در مهندسی عمران، هنگام وزن کردن اجسام، در ساخت پروتزها و غیره اندازه گیری می شوند. تعیین فشار نیز به نیروی اندازه گیری نیاز دارد. اعتقاد بر این است که هنگام کار با اجسام جامد، نیرو اندازه گیری می شود و هنگام کار با مایعات و گازها، فشار تعیین می شود. این بدان معنی است که نیرو زمانی در نظر گرفته می شود که عمل به یک نقطه خاص اعمال شود، و فشار زمانی تعیین می شود که نیرو در یک نقطه نسبتاً توزیع شود. منطقه بزرگ.
سنسورهای نیرو را می توان به دو دسته کمی و کیفی تقسیم کرد. سنسورهای کمی نیرو را اندازه گیری می کنند و مقدار آن را در واحدهای الکتریکی نشان می دهند. نمونه هایی از این سنسورها لودسل ها و کرنش سنج ها هستند. سنسورهای کیفی ابزارهای آستانه ای هستند که وظیفه آنها کمی کردن مقدار یک نیرو نیست، بلکه تشخیص اینکه از یک سطح مشخص از نیروی اعمال شده فراتر رفته است. نمونه ای از این دستگاه ها صفحه کلید کامپیوتری است که هر کلید آن تنها زمانی که با نیروی خاصی فشار داده شود، تماس مربوطه را می بندد. سنسورهای باکیفیت اغلب برای تشخیص حرکت و موقعیت اشیا استفاده می شوند. تشک درب که به فشار وارد شده به آن پاسخ می دهد و کابل پیزوالکتریک نیز نمونه هایی از سنسورهای فشار با کیفیت هستند.
روش های اندازه گیری نیرو را می توان به گروه های زیر تقسیم کرد:
1. تعادل یک نیروی مجهول با نیروی گرانش جسمی با جرم معلوم
2. اندازه گیری شتاب جسمی با جرم معلوم که نیروی مجهولی به آن وارد می شود
3. تعادل نیروی مجهول با نیروی الکترومغناطیسی
4. تبدیل نیرو به فشار سیال و اندازه گیری این فشار
5. اندازه گیری تغییر شکل یک عنصر الاستیک سیستم ناشی از یک نیروی ناشناخته
در سنسورهای مدرن، روش 5 بیشتر مورد استفاده قرار می گیرد و روش های 3 و 4 به ندرت مورد استفاده قرار می گیرند.
اکثر سنسورها مستقیما نیرو را به سیگنال الکتریکی تبدیل نمی کنند. این معمولاً به چندین مرحله میانی نیاز دارد. بنابراین، به عنوان یک قاعده، سنسورهای نیرو دستگاه های ترکیبی هستند. به عنوان مثال، یک سنسور نیرو اغلب ترکیبی از یک مبدل نیرو-جابجایی و یک آشکارساز موقعیت (جابجایی) است. این ممکن است یک فنر سیم پیچ ساده باشد، کاهش طول ناشی از نیروی فشاری اعمال شده متناسب با ضریب الاستیسیته آن خواهد بود.
شکل 1A یک سنسور متشکل از یک فنر و یک آشکارساز جابجایی را نشان می دهد که بر اساس یک ترانسفورماتور دیفرانسیل کنترل شده خطی (LVDT) اجرا شده است. در محدوده خطی تغییر طول فنر، ولتاژ در خروجی LVDT با نیروی اعمال شده متناسب است. در شکل شکل 1B نسخه دیگری از سنسور نیرو را نشان می دهد که شامل یک غشای موجدار پر از مایع است که مستقیماً تحت تأثیر نیرو قرار می گیرد و یک سنسور فشار. غشای راه راه، با توزیع نیرو در ورودی در امتداد سطح عنصر حساس سنسور فشار، نقش مبدل نیرو-فشار را ایفا می کند.
 سلول بارگذارییک عنصر حسگر مقاومتی انعطاف پذیر است که مقاومت آن متناسب با تنش مکانیکی اعمال شده (مقدار تغییر شکل) است. تمام کرنش سنج ها بر اساس اثر پیزورزیستیو ذکر شده قبلی هستند. کرنش سنج سیم مقاومتی است که به یک بستر انعطاف پذیر متصل می شود که به نوبه خود به جسمی که نیرو یا ولتاژ اندازه گیری می شود متصل می شود. در این مورد، باید یک اتصال مکانیکی قابل اعتماد بین جسم و عنصر حساس به کرنش تضمین شود، در حالی که سیم مقاومت باید از نظر الکتریکی از جسم جدا شود. ضرایب انبساط حرارتی زیرلایه و سیم باید مطابقت داشته باشند. برای به دست آوردن حساسیت خوب، سنسور باید دارای مقاطع طولی بلند و عرضی کوتاه باشد (شکل 2). این کار برای اطمینان از اینکه حساسیت در جهت عرضی از 2٪ حساسیت طولی تجاوز نمی کند انجام می شود. برای اندازه گیری ولتاژ در جهات مختلف، پیکربندی سنسورها تغییر می کند. لازم به ذکر است که عناصر حساس به کرنش نیمه هادی حساسیت نسبتاً قوی به تغییرات دما دارند، بنابراین لازم است مدارهای جبران دما در مدارهای رابط یا در خود سنسورها ارائه شود.
سلول بارگذارییک عنصر حسگر مقاومتی انعطاف پذیر است که مقاومت آن متناسب با تنش مکانیکی اعمال شده (مقدار تغییر شکل) است. تمام کرنش سنج ها بر اساس اثر پیزورزیستیو ذکر شده قبلی هستند. کرنش سنج سیم مقاومتی است که به یک بستر انعطاف پذیر متصل می شود که به نوبه خود به جسمی که نیرو یا ولتاژ اندازه گیری می شود متصل می شود. در این مورد، باید یک اتصال مکانیکی قابل اعتماد بین جسم و عنصر حساس به کرنش تضمین شود، در حالی که سیم مقاومت باید از نظر الکتریکی از جسم جدا شود. ضرایب انبساط حرارتی زیرلایه و سیم باید مطابقت داشته باشند. برای به دست آوردن حساسیت خوب، سنسور باید دارای مقاطع طولی بلند و عرضی کوتاه باشد (شکل 2). این کار برای اطمینان از اینکه حساسیت در جهت عرضی از 2٪ حساسیت طولی تجاوز نمی کند انجام می شود. برای اندازه گیری ولتاژ در جهات مختلف، پیکربندی سنسورها تغییر می کند. لازم به ذکر است که عناصر حساس به کرنش نیمه هادی حساسیت نسبتاً قوی به تغییرات دما دارند، بنابراین لازم است مدارهای جبران دما در مدارهای رابط یا در خود سنسورها ارائه شود.
سنسورهای لمسی- این یک کلاس ویژه از مبدل های نیرو یا فشار است که با ضخامت کم مشخص می شود. این سنسورها در کاربردهایی که نیرو یا فشار بین دو سطح نزدیک به هم اندازه گیری می شود مفید هستند. چنین حسگرهایی اغلب در رباتیک استفاده می شوند، به عنوان مثال، آنها بر روی "انگشتان" درایوهای مکانیکی نصب می شوند تا ارائه دهند. بازخورددر تماس با یک جسم - این یادآور نحوه عملکرد حسگرهای لمسی روی پوست انسان است. حسگرهای لمسی در نمایشگرهای لمسی، کیبوردها و سایر دستگاه هایی که نیاز به پاسخ به لمس فیزیکی دارند، استفاده می شود. حسگرهای لمسی به طور گسترده در زیست پزشکی، برای تعیین نیش دندان و نصب صحیح روکش ها در عمل دندانپزشکی و همچنین برای مطالعه فشار روی پاهای فرد هنگام راه رفتن استفاده می شود. گاهی در حین عمل پروتز در مفاصل مصنوعی برای اصلاح موقعیت و غیره نصب می شود. در ساخت و ساز و ساخت مکانیکی، از حسگرهای لمسی برای تشخیص نیروهای وارد بر دستگاه های ثابت استفاده می شود.
 چندین روش برای تولید عناصر حسگر لمسی استفاده می شود. در برخی از آنها، لایه نازک خاصی از مواد حساس به تنش مکانیکی بر روی سطح جسم تشکیل می شود. در شکل شکل 3 یک حسگر لمسی ساده را نشان می دهد که عملکردهای روشن-خاموش را ارائه می دهد که از دو ورقه فویل و یک فاصله دهنده تشکیل شده است. سوراخ های گرد (یا هر شکل ضروری دیگر) در داخل واشر ایجاد می شود. یکی از ورق های فویل به زمین متصل می شود و دومی به یک مقاومت بار متصل می شود. در صورت نیاز به کنترل چندین ناحیه حساس از مالتی پلکسر استفاده می شود. هنگامی که نیروی خارجی به هادی بالایی روی سوراخ پد وارد می شود، خم می شود و با هادی پایینی تماس برقرار می کند و در نتیجه با آن تماس الکتریکی برقرار می کند و مقاومت بار را زمین می کند. در این حالت سیگنال خروجی صفر می شود که نشان دهنده نیروی اعمال شده است. هادی های بالا و پایین را می توان با جوهر رسانا روی یک بستر چاپ کرد. نواحی حساس چنین حسگرهایی با ردیف ها و ستون های هادی های جوهردار تعیین می شود. لمس ناحیه خاصی از سطح حساس منجر به بسته شدن سطر و ستون مربوطه می شود که محلی شدن نیروی اعمال شده را نشان می دهد. حسگرهای لمسی خوب از فیلم های پیزوالکتریک به دست می آیند که در هر دو حالت غیرفعال و فعال استفاده می شوند. بسیاری از سنسورهای لمسی به عنوان سوئیچ های لمسی عمل می کنند. بر خلاف کلیدهای سنتی که قابلیت اطمینان کنتاکت های آنها در مواجهه با رطوبت و گرد و غبار بسیار کاهش می یابد، کلیدهای پیزوالکتریک به دلیل طراحی یکپارچه خود می توانند در شرایط نامطلوب محیط.
چندین روش برای تولید عناصر حسگر لمسی استفاده می شود. در برخی از آنها، لایه نازک خاصی از مواد حساس به تنش مکانیکی بر روی سطح جسم تشکیل می شود. در شکل شکل 3 یک حسگر لمسی ساده را نشان می دهد که عملکردهای روشن-خاموش را ارائه می دهد که از دو ورقه فویل و یک فاصله دهنده تشکیل شده است. سوراخ های گرد (یا هر شکل ضروری دیگر) در داخل واشر ایجاد می شود. یکی از ورق های فویل به زمین متصل می شود و دومی به یک مقاومت بار متصل می شود. در صورت نیاز به کنترل چندین ناحیه حساس از مالتی پلکسر استفاده می شود. هنگامی که نیروی خارجی به هادی بالایی روی سوراخ پد وارد می شود، خم می شود و با هادی پایینی تماس برقرار می کند و در نتیجه با آن تماس الکتریکی برقرار می کند و مقاومت بار را زمین می کند. در این حالت سیگنال خروجی صفر می شود که نشان دهنده نیروی اعمال شده است. هادی های بالا و پایین را می توان با جوهر رسانا روی یک بستر چاپ کرد. نواحی حساس چنین حسگرهایی با ردیف ها و ستون های هادی های جوهردار تعیین می شود. لمس ناحیه خاصی از سطح حساس منجر به بسته شدن سطر و ستون مربوطه می شود که محلی شدن نیروی اعمال شده را نشان می دهد. حسگرهای لمسی خوب از فیلم های پیزوالکتریک به دست می آیند که در هر دو حالت غیرفعال و فعال استفاده می شوند. بسیاری از سنسورهای لمسی به عنوان سوئیچ های لمسی عمل می کنند. بر خلاف کلیدهای سنتی که قابلیت اطمینان کنتاکت های آنها در مواجهه با رطوبت و گرد و غبار بسیار کاهش می یابد، کلیدهای پیزوالکتریک به دلیل طراحی یکپارچه خود می توانند در شرایط نامطلوب محیط.
نوع دیگری از سنسورهای لمسی است پیزومقاومت کنندهعنصر حساس از موادی ساخته شده است که مقاومت الکتریکی آنها بستگی به کاربرد دارد استرس مکانیکییا فشار چنین موادی شامل الاستومرهای رسانا یا خمیرهای حساس به فشار هستند. الاستومرهای رسانا از لاستیک سیلیکونی، پلی اورتان و سایر موادی که حاوی ذرات یا الیاف رسانا هستند ساخته می شوند. به عنوان مثال، لاستیک رسانا با وارد کردن پودر کربن به لاستیک معمولی به دست می آید. اصل کار سنسورهای الاستومری یا بر اساس تغییر در ناحیه تماس زمانی که الاستومر بین دو صفحه رسانا فشرده می شود یا بر اساس تغییر ضخامت لایه الاستومری است. بسته به میزان نیروی خارجی وارد بر حسگر، ناحیه تماس بین دستگاه گیره و الاستومر تغییر می کند و در نتیجه مقاومت الکتریکی تغییر می کند.
حسگرهای لمسی پیزورمقاومتی نازکتر از پلیمرهای نیمه رسانا ساخته شدهاند که مقاومت آنها به فشار نیز بستگی دارد. طراحی چنین سنسورهایی شبیه یک سوئیچ غشایی است. در مقایسه با کرنش سنج ها، عناصر حسگر پیزومقاومتی دارای محدوده دینامیکی وسیع تری هستند.
سنسورهای نیروی پیزوالکتریک
 سنسورهای لمسی پیزوالکتریک در نظر گرفته شده برای آنها در نظر گرفته نشده است اندازه گیری های دقیقاستحکام - قدرت. با این حال، بر اساس همان اثر پیزوالکتریک، سنسورهای نیروی دقیق، چه فعال و چه غیرفعال، قابل تحقق هستند. هنگام توسعه چنین حسگرهایی، همیشه باید به خاطر داشت که دستگاه های پیزوالکتریک نمی توانند فرآیندهای ثابت را اندازه گیری کنند. این بدان معناست که سنسورهای نیروی پیزوالکتریک تغییرات نیرو را به سیگنال الکتریکی متناوب تبدیل می کنند، اما به هیچ وجه به مقدار ثابت نیروی خارجی پاسخ نمی دهند. از آنجایی که نیروهای اعمال شده می توانند برخی از خواص مواد را تغییر دهند، تأثیر کامل سیگنال های تحریک باید هنگام طراحی حسگرهای فعال در نظر گرفته شود. در شکل شکل 4 نوعی از سنسور نیروی فعال را نشان می دهد. هنگام انجام اندازه گیری های کمی با استفاده از چنین سنسورهایی، باید به خاطر داشت که محدوده اندازه گیری آن به فرکانس تشدید مکانیکی کریستال پیزوالکتریک مورد استفاده بستگی دارد. اصل عملکرد چنین سنسورهایی بر این واقعیت استوار است که وقتی کریستال های کوارتز برش های خاصی که به عنوان تشدید کننده در ژنراتورهای الکترونیکی استفاده می شوند به طور مکانیکی بارگذاری می شوند، فرکانس تشدید آنها تغییر می کند.
سنسورهای لمسی پیزوالکتریک در نظر گرفته شده برای آنها در نظر گرفته نشده است اندازه گیری های دقیقاستحکام - قدرت. با این حال، بر اساس همان اثر پیزوالکتریک، سنسورهای نیروی دقیق، چه فعال و چه غیرفعال، قابل تحقق هستند. هنگام توسعه چنین حسگرهایی، همیشه باید به خاطر داشت که دستگاه های پیزوالکتریک نمی توانند فرآیندهای ثابت را اندازه گیری کنند. این بدان معناست که سنسورهای نیروی پیزوالکتریک تغییرات نیرو را به سیگنال الکتریکی متناوب تبدیل می کنند، اما به هیچ وجه به مقدار ثابت نیروی خارجی پاسخ نمی دهند. از آنجایی که نیروهای اعمال شده می توانند برخی از خواص مواد را تغییر دهند، تأثیر کامل سیگنال های تحریک باید هنگام طراحی حسگرهای فعال در نظر گرفته شود. در شکل شکل 4 نوعی از سنسور نیروی فعال را نشان می دهد. هنگام انجام اندازه گیری های کمی با استفاده از چنین سنسورهایی، باید به خاطر داشت که محدوده اندازه گیری آن به فرکانس تشدید مکانیکی کریستال پیزوالکتریک مورد استفاده بستگی دارد. اصل عملکرد چنین سنسورهایی بر این واقعیت استوار است که وقتی کریستال های کوارتز برش های خاصی که به عنوان تشدید کننده در ژنراتورهای الکترونیکی استفاده می شوند به طور مکانیکی بارگذاری می شوند، فرکانس تشدید آنها تغییر می کند.
مدار پیشنهادی برای تکرار تقویت کننده ای است که به میدان الکترومغناطیسی ایجاد شده توسط دستگاه های خارجی بسیار حساس است. هنگامی که کنتاکت ورودی مدار به آنتن متصل می شود، LED وجود تشعشعات میدان الکترومغناطیسی و تداخل تجهیزات الکتریکی را نشان می دهد. LED همچنین واقعیت لمس تماس را نشان می دهد، زیرا نقش آنتن در آن قرار دارد در این موردتوسط بدن انسان انجام می شود. از این رو نام - سنسور لمسی. نام دیگر مدار آنتن فعال است.
نمودار شماتیکسنسور لمسی در شکل 1 نشان داده شده است.
مدار شبیه یک نوسان ساز ترانزیستوری است ساختارهای n-p-n. یکی از پایانه های سیم پیچ L1 مستقیماً به پایه ورودی X1 متصل می شود. قطبیت LED VD1 مهم نیست. مقاومت R2 جریان عبوری از LED را محدود می کند و در نتیجه روشنایی درخشش آن را هنگام فعال شدن سنسور تعیین می کند.
سنسور لمسی روی آن مونتاژ شده است تخته ناناندازه 40 × 40 میلی متر. شکل ظاهری سازه در شکل 2 نشان داده شده است.
 |
|
| شکل 2. | ظاهر سنسور لمسی |
سیم پیچ های L1 و L2 بر روی یک قاب مشترک با دو بخش سیم پیچ و یک هسته فریت تنظیم قرار دارند. قطر خارجی قاب 10 میلی متر، طول هسته 23 میلی متر، قطر نخ در پایه هسته 6 میلی متر است. در طرح نشان داده شده در شکل 2، L1 در قسمت بالا، L2 در قسمت پایین پیچیده شده است. هر کویل شامل 100 دور سیم PEL 0.2 می باشد. سیم پیچ ها بر اساس. با استفاده از یک پیچ گوشتی، هسته داخل قاب پیچ می شود. LED VD1 - هر یک از سری AL307. یک گلبرگ زمینی به عنوان X1 استفاده می شود. لمس آن باعث روشن شدن LED می شود.
VD1 را می توان به صورت موازی متصل کرد دستگاه اندازه گیریبه عنوان مثال، یک مولتی متر در حالت اندازه گیری ولتاژ، که به شما امکان می دهد سطح قدرت میدان را ارزیابی کنید. در این حالت، آنتن خارجی می تواند یک قطعه سیم نصب به طول چندین سانتی متر باشد. تنظیم مدار به انتخاب طول آنتن و یافتن موقعیت هسته ای که در آن ولتاژ روی LED حداکثر است ختم می شود.
مدار در مورد انتخاب پایه عنصر سختگیر نیست. به عنوان مثال، در نسخه اصلی مدار، از ترانزیستور KT815G استفاده شد، مقاومت مقاومت R1 100 کیلو اهم بود. دو سیم پیچ بر روی یک هسته فریت میله ای یک آنتن مغناطیسی موج بلند از یک گیرنده رادیویی به عنوان L1 و L2 استفاده شد. سیم پیچ ها را می توان در امتداد هسته حرکت داد. هنگام حرکت سیم پیچ ها، پدیده هایی مشاهده شد که برخلاف طرح پیشنهادی در تضاد با قانون القای الکترومغناطیسی نبود. هنگامی که سیم پیچ ها به طور قابل توجهی از یکدیگر و بدون هسته فریت جدا شدند، مدار از کار افتاد.
این مدار نه تنها در طراحی سنج های قدرت میدان، بلکه در دستگاه های اتوماسیون و سیگنالینگ نیز کاربرد عملی پیدا می کند. سنسور لمسی را می توان به میکروکنترلر متصل کرد. برای انجام این کار، شما باید یک تبدیل ولتاژ آنالوگ به دیجیتال را بر روی LED VD1 انجام دهید، احتمالاً با استفاده از منابع خود میکروکنترلر، اگر حاوی ADC داخلی باشد.
در خاتمه، لازم به ذکر است که مدارهای حسگر لمسی زیادی بر اساس ترانزیستورهای اثر میدانی و فاقد عناصر القایی وجود دارد. آنها ممکن است در بسیاری از موارد کارآمدتر عمل کنند، اما طرح نشان داده شده در این مقاله نمونه ای از طرح اصلی است راه حل فنیو برای آماتورهای رادیویی مبتدی در نظر گرفته شده است.
ادبیات
- Brovin V.I. پدیده انتقال انرژی اندوکتانس ها از طریق گشتاورهای مغناطیسی یک ماده واقع در فضای اطراف و کاربرد آن. - M.: MetaSintez، 2003 - 20 p.
- کریلوف کی. اس.، لی جاهو، کیم یانگ جین، کیم سئونگوان، لی سانگ ها. ثبت اختراع شماره ۲۳۹۵۸۷۶. آنتن مغناطیسی فعال با هسته فریت.
سنسور خازنی یکی از انواع سنسورهای غیر تماسی است که اصل عملکرد آن بر اساس تغییر در ثابت دی الکتریک محیط بین دو صفحه خازن است. یک پوشش خدمت می کند سنسور لمسیمدارها به شکل صفحه یا سیم فلزی است و دومی یک ماده رسانای الکتریکی است مانند فلز، آب یا بدن انسان.
هنگام توسعه یک سیستم روشن شدن خودکاربرای تامین آب توالت برای یک بید، استفاده از حسگر حضور خازنی و سوئیچ با آن ضروری شد قابلیت اطمینان بالا، مقاومت در برابر تغییر دمای خارجی، رطوبت، گرد و غبار و ولتاژ تغذیه. همچنین میخواستم نیازی به لمس کنترلهای سیستم را از بین ببرم. الزامات ارائه شده فقط می تواند توسط مدارهای حسگر لمسی که بر اساس اصل تغییر ظرفیت خازنی کار می کنند برآورده شود. طرح آمادهمن نتوانستم موردی را پیدا کنم که شرایط لازم را برآورده کند، بنابراین مجبور شدم خودم آن را توسعه دهم.
نتیجه یک حسگر لمسی خازنی جهانی است که نیازی به پیکربندی ندارد و به نزدیک شدن اجسام رسانای الکتریکی، از جمله یک فرد، در فاصله تا 5 سانتی متر پاسخ می دهد. دامنه کاربرد سنسور لمسی پیشنهادی محدود نیست. به عنوان مثال می توان از آن برای روشن کردن سیستم های روشنایی استفاده کرد دزدگیر، تعیین سطح آب و در بسیاری موارد دیگر.
نمودارهای مدار الکتریکی
برای کنترل آب در بیدی توالت، دو سنسور لمسی خازنی مورد نیاز بود. یک سنسور باید مستقیماً روی توالت نصب می شد؛ باید سیگنال منطقی صفر را در حضور یک نفر و در غیاب سیگنال منطقی یک تولید می کرد. دومین حسگر خازنی قرار بود به عنوان سوئیچ آب عمل کند و در یکی از دو حالت منطقی باشد.
هنگامی که عقربه به سنسور آورده شد، سنسور باید حالت منطقی را در خروجی تغییر می داد - از حالت یک اولیه به حالت صفر منطقی، زمانی که دست دوباره لمس شد، از حالت صفر به حالت منطقی یک. و به همین ترتیب ad infinitum، تا زمانی که سوئیچ لمسی یک سیگنال فعال کننده صفر منطقی را از سنسور حضور دریافت کند.
مدار حسگر لمسی خازنی
اساس مدار حسگر حضور لمسی خازنی یک ژنراتور پالس مستطیلی اصلی است که مطابق با طرح کلاسیک بر روی دو عنصر منطقی ریزمدار D1.1 و D1.2 ساخته شده است. فرکانس ژنراتور با درجه بندی عناصر R1 و C1 تعیین می شود و حدود 50 کیلوهرتز انتخاب می شود. مقدار فرکانس عملاً هیچ تأثیری بر عملکرد سنسور خازنی ندارد. فرکانس را از 20 به 200 کیلوهرتز تغییر دادم و از نظر ظاهری هیچ تأثیری در عملکرد دستگاه مشاهده نکردم.
از پایه 4 تراشه D1.2 مستطیلی شکلاز طریق مقاومت R2 به ورودی های 8، 9 ریزمدار D1.3 و از طریق مقاومت متغیر R3 به ورودی های 12،13 از D1.4 می رود. سیگنال با تغییر جزئی در شیب جلوی پالس به ورودی ریز مدار D1.3 می رسد. سنسور نصب شده، که یک تکه سیم یا صفحه فلزی است. در ورودی D1.4، به دلیل خازن C2، جلو برای مدت زمان مورد نیاز برای شارژ مجدد تغییر می کند. به لطف وجود مقاومت اصلاح کننده R3، می توان لبه پالس را در ورودی D1.4 برابر با لبه پالس در ورودی D1.3 تنظیم کرد.
اگر دست یا یک جسم فلزی را به آنتن نزدیک کنید (سنسور لمسی)، ظرفیت ورودی ریزمدار DD1.3 افزایش مییابد و جلوی پالس ورودی نسبت به جلوی پالس به تأخیر میافتد. رسیدن به ورودی DD1.4. برای "گرفتن" این تاخیر، پالس های معکوس به تراشه DD2.1 که یک فلیپ فلاپ D است که به شرح زیر عمل می کند، تغذیه می شود. در امتداد لبه مثبت پالس که به ورودی ریزمدار C می رسد، سیگنالی که در آن لحظه در ورودی D بود به خروجی ماشه منتقل می شود در نتیجه اگر سیگنال در ورودی D تغییر نکند، پالس های ورودی در ورودی شمارش C بر سطح سیگنال خروجی تأثیر نمی گذارد. این خاصیت ماشه D ساخت یک سنسور لمسی خازنی ساده را ممکن کرد.
هنگامی که ظرفیت آنتن، به دلیل نزدیک شدن بدن انسان به آن، در ورودی DD1.3 افزایش می یابد، پالس به تاخیر می افتد و این باعث رفع ماشه D و تغییر حالت خروجی آن می شود. LED HL1 برای نشان دادن وجود ولتاژ تغذیه و LED HL2 برای نشان دادن نزدیکی به سنسور لمسی استفاده می شود.
مدار سوئیچ لمسی
از مدار حسگر لمسی خازنی نیز می توان برای کارکرد سوئیچ لمسی استفاده کرد، اما با کمی تغییر، زیرا نه تنها باید به نزدیک شدن بدن انسان پاسخ دهد، بلکه پس از برداشتن دست نیز در حالت ثابت باقی می ماند. برای حل این مشکل، مجبور شدیم یک ماشه D دیگر به نام DD2.2 را به خروجی حسگر لمسی اضافه کنیم که با استفاده از یک تقسیم کننده به دو مدار متصل شده است.
مدار حسگر خازنی کمی اصلاح شده است. برای حذف آلارم های کاذب، از آنجایی که یک فرد می تواند به آرامی دست خود را بیاورد و بردارد، به دلیل وجود تداخل، سنسور می تواند چندین پالس را به ورودی شمارش D ماشه ارسال کند و الگوریتم عملیاتی مورد نیاز سوئیچ را نقض کند. بنابراین، یک زنجیره RC از عناصر R4 و C5 اضافه شد که برای مدت کوتاهی توانایی تغییر ماشه D را مسدود کرد.

ماشه DD2.2 به همان روش DD2.1 کار می کند، اما سیگنال ورودی D نه از عناصر دیگر، بلکه از خروجی معکوس DD2.2 تامین می شود. در نتیجه، در امتداد لبه مثبت پالس که به ورودی C می رسد، سیگنال در ورودی D به سمت مخالف تغییر می کند. به عنوان مثال، اگر در حالت اولیه یک صفر منطقی در پایه 13 وجود داشت، با یک بار بالا بردن دست خود به سمت سنسور، ماشه تغییر می کند و یک منطقی روی پایه 13 تنظیم می شود. دفعه بعد که با سنسور تعامل کردید، پین 13 دوباره روی صفر منطقی تنظیم می شود.
برای مسدود کردن سوئیچ در غیاب فردی در توالت، یک واحد منطقی از سنسور به ورودی R ارائه می شود (تنظیم صفر در خروجی ماشه، بدون توجه به سیگنال های موجود در سایر ورودی های آن). یک صفر منطقی در خروجی سوئیچ خازنی تنظیم شده است که از طریق مهار به پایه ترانزیستور کلید برای روشن کردن شیر برقی در واحد قدرت و سوئیچینگ عرضه می شود.
مقاومت R6 در صورت عدم وجود سیگنال مسدود کننده از سنسور خازنی در صورت خرابی آن یا شکستن سیم کنترل، ماشه را در ورودی R مسدود می کند و در نتیجه امکان تامین آب خود به خود در بیده را از بین می برد. خازن C6 ورودی R را از تداخل محافظت می کند. LED HL3 برای نشان دادن میزان آب موجود در بیده عمل می کند.
طراحی و جزئیات حسگرهای لمسی خازنی
هنگامی که من شروع به توسعه یک سیستم حسگر برای تامین آب در یک بید کردم، به نظرم سخت ترین کار توسعه یک سنسور اشغال خازنی بود. این به دلیل تعدادی محدودیت نصب و راه اندازی بود. من نمی خواستم سنسور به طور مکانیکی به درب توالت وصل شود، زیرا باید به طور دوره ای برای شستشو برداشته شود و تداخلی با آن ایجاد نمی کند. ضد عفونی کردنخود توالت به همین دلیل است که یک ظرف را به عنوان عنصر واکنش انتخاب کردم.
سنسور حضور
بر اساس نمودار منتشر شده در بالا، یک نمونه اولیه ساختم. قطعات حسگر خازنی روی یک برد مدار چاپی مونتاژ می شوند؛ برد در یک جعبه پلاستیکی قرار می گیرد و با یک درب بسته می شود. برای اتصال آنتن، یک کانکتور تک پین در کیس تعبیه شده است؛ یک کانکتور چهار پین RSh2N برای تامین ولتاژ تغذیه و سیگنال نصب شده است. برد مدار چاپی با لحیم کاری به کانکتورها متصل می شود هادی های مسیدر عایق فلوئوروپلاستیک

سنسور لمسی خازنی روی دو ریز مدار سری KR561 LE5 و TM2 مونتاژ شده است. به جای ریز مدار KR561LE5، می توانید از KR561LA7 استفاده کنید. ریز مدارهای سری 176 و آنالوگ های وارداتی نیز مناسب هستند. مقاومت ها، خازن ها و ال ای دی ها برای هر نوع مناسب هستند. خازن C2، برای عملکرد پایدار سنسور خازنی هنگام کار در شرایط نوسانات زیاد دمای محیط، باید با یک TKE کوچک گرفته شود.
سنسور زیر سکوی توالتی که روی آن نصب شده است نصب می شود مخزندر محلی که در صورت نشتی از مخزن، آب نمی تواند وارد شود. بدنه حسگر با استفاده از نوار دو طرفه به توالت چسبانده شده است.

سنسور آنتن سنسور خازنی یک تکه سیم رشته ای مسی به طول 35 سانتی متر است که با فلوروپلاستیک عایق شده و با نوار شفاف به دیواره بیرونی کاسه توالت یک سانتی متر زیر سطح لیوان چسبانده شده است. سنسور به وضوح در عکس قابل مشاهده است.

برای تنظیم حساسیت سنسور لمسی، پس از نصب آن بر روی توالت، مقاومت مقاومت پیرایش R3 را تغییر دهید تا LED HL2 خاموش شود. بعد، دست خود را روی درب توالت بالای محل سنسور قرار دهید، LED HL2 باید روشن شود، اگر دست خود را بردارید، باید خاموش شود. از آنجایی که ران انسان توسط جرم دست های بیشتر، سپس در حین کار، حسگر لمسی، پس از چنین تنظیمی، تضمین می شود که کار کند.
طراحی و جزئیات سوئیچ لمسی خازنی
مدار سوئیچ لمسی خازنی دارای قطعات بیشتری است و برای قرار دادن آنها به محفظه بزرگتری نیاز است و به دلایل زیبایی ظاهرمحفظه ای که سنسور حضور در آن قرار داشت برای نصب در مکانی قابل مشاهده چندان مناسب نبود. پریز دیواری rj-11 برای اتصال تلفن جلب توجه کرد. اندازه مناسبی داشت و ظاهر خوبی داشت. با حذف همه چیز غیر ضروری از سوکت، یک برد مدار چاپی برای یک سوئیچ لمسی خازنی در آن قرار دادم.

برای ایمن سازی تخته مدار چاپییک پایه کوتاه در پایه کیس نصب شد و یک برد مدار چاپی با قطعات سوئیچ لمسی با استفاده از یک پیچ به آن پیچ شد.

سنسور خازنی با چسباندن یک ورق برنجی به پایین روکش سوکت با چسب Moment ساخته شد و قبلاً پنجره ای را برای LED های موجود در آنها بریده بود. هنگام بستن درب، فنر (که از یک فندک سنگ چخماق گرفته شده است) با ورق برنجی تماس پیدا می کند و بنابراین تماس الکتریکی بین مدار و سنسور را تضمین می کند.

سوئیچ لمسی خازنی با استفاده از یک پیچ خودکار روی دیوار نصب می شود. برای این منظور یک سوراخ در محفظه در نظر گرفته شده است. سپس برد و کانکتور نصب شده و پوشش با چفت محکم می شود.

راه اندازی یک سوئیچ خازنی عملاً با راه اندازی سنسور حضور که در بالا توضیح داده شد تفاوتی ندارد. برای تنظیم آن، باید ولتاژ تغذیه را اعمال کنید و مقاومت را طوری تنظیم کنید که LED HL2 وقتی دستی به سنسور میآید روشن شود و با برداشتن آن خاموش شود. در مرحله بعد، باید سنسور لمسی را فعال کنید و دست خود را به سمت سنسور سوئیچ حرکت دهید و بردارید. LED HL2 باید چشمک بزند و LED قرمز HL3 باید روشن شود. هنگامی که دست برداشته می شود، LED قرمز باید روشن بماند. هنگامی که دوباره دست خود را بالا می آورید یا بدن خود را از سنسور دور می کنید، LED HL3 باید خاموش شود، یعنی منبع آب را در بیده خاموش کنید.
PCB جهانی
سنسورهای خازنی ارائه شده در بالا بر روی بردهای مدار چاپی مونتاژ شده اند، کمی متفاوت از برد مدار چاپی نشان داده شده در عکس زیر. این به دلیل ترکیب هر دو برد مدار چاپی در یک برد جهانی است. اگر یک سوئیچ لمسی مونتاژ می کنید، فقط باید قطعه شماره 2 را برش دهید. اگر یک سنسور حضور لمسی مونتاژ می کنید، آهنگ شماره 1 حذف می شود و همه عناصر نصب نمی شوند.

عناصر لازم برای عملکرد سوئیچ لمسی، اما تداخل در عملکرد سنسور حضور، R4، C5، R6، C6، HL2 و R4، نصب نشده اند. به جای R4 و C6، جامپرهای سیمی لحیم می شوند. زنجیره R4، C5 را می توان رها کرد. تاثیری در کار نخواهد داشت.
در زیر نقشه ای از یک برد مدار چاپی برای خنجر کردن با استفاده از روش حرارتی اعمال آهنگ بر روی فویل آورده شده است.

کافی است طرح را روی کاغذ گلاسه یا کاغذ ردیابی چاپ کنید و قالب برای ساخت برد مدار چاپی آماده است.
عملکرد بدون مشکل سنسورهای خازنی برای سیستم کنترل لمسی برای تامین آب در یک بیده در عمل طی سه سال کار مداوم تایید شده است. هیچ نقصی ثبت نشده است.
با این حال، می خواهم توجه داشته باشم که مدار به نویز ضربه ای قدرتمند حساس است. ایمیلی دریافت کردم که برای تنظیم آن کمک می خواهد. معلوم شد که در حین اشکال زدایی مدار یک آهن لحیم کاری با یک کنترل کننده دمای تریستور در نزدیکی آن وجود دارد. پس از خاموش شدن هویه لحیم کاری مدار شروع به کار کرد.
چنین مورد دیگری نیز وجود داشت. سنسور خازنی در یک لامپ نصب شده بود که به همان خروجی یخچال متصل بود. وقتی روشن شد، چراغ روشن شد و وقتی دوباره خاموش شد. با اتصال لامپ به پریز دیگر مشکل حل شد.
نامه ای در مورد کاربرد موفقیت آمیز مدار حسگر خازنی توصیف شده برای تنظیم سطح آب دریافت کردم مخزن ذخیرهساخته شده از پلاستیک در قسمت های پایین و بالایی یک سنسور چسبانده شده با سیلیکون وجود داشت که روشن و خاموش شدن پمپ الکتریکی را کنترل می کرد.
انتخابگر 2008 شماره 7-8
حسگرهای لمسی خازنی بر اساس ظرفیت الکتریکی بدن انسان کار می کنند. به عنوان مثال، هنگامی که یک انگشت به سنسور نزدیک می شود، این یک ظرفیت بین سنسور و زمین ایجاد می کند که در محدوده 30 ... 100 pF قرار دارد. این افکت را می توان در سنسورهای مجاورت و سوئیچ های کنترل شده با لمس استفاده کرد.
حسگرهای لمسی خازنی دارند مزایای آشکاردر مقایسه با سنسورهای دیگر (به عنوان مثال، حسگرهایی که با تداخل با فرکانس 50/60 هرتز یا آنهایی که مقاومت را اندازهگیری میکنند)، اما اجرای آنها کار فشردهتری دارند. سازندگان تراشه مانند Microchip در گذشته آی سی های سفارشی را برای این منظور ایجاد کرده اند. با این حال، اکنون می توان یک آشکارساز خازنی و/یا سوئیچ قابل اعتماد با استفاده از تعداد کمی از اجزای استاندارد ایجاد کرد.
در این مدار، تغییراتی را در عرض پالس سیگنال که هنگام لمس یک کنتاکت رخ می دهد، تشخیص می دهیم. در شکل 1 می توانید گره های زیر را در نظر بگیرید (از چپ به راست):
برنج. 1. IC1 - 561TL1
مولد پالس مستطیلی بر اساس یک ماشه اشمیت (IC CD4093)؛
مدار RC با یک دیود سرکوب و به دنبال آن یک ماشه اشمیت/صفحه تماس با خازن ایزوله 470 pF.
- یک مدار RC یکپارچه که تغییرات عرض پالس را به ولتاژ تبدیل می کند. این ولتاژ در هنگام لمس صفحه در ناحیه 2.9...3.2 ولت و در غیر این صورت 2.6 ولت است.
- مقایسه کننده LM 339 برای مقایسه ولتاژ در نقطه C با ولتاژ مرجع در نقطه D استفاده می شود. دومی حدود 2.8 ولت است و توسط تقسیم کننده ولتاژ تنظیم می شود.
به محض لمس صفحه لمسی، خروجی مدار فعال می شود. برای توضیح عملکرد مدار، شکل 2 اسیلوگرام سیگنال ها را در نقاط مختلف نشان می دهد. خط نقطه چین حالت را هنگام لمس صفحه سنسور نشان می دهد، خط ثابت - زمانی که هیچ لمسی وجود ندارد.
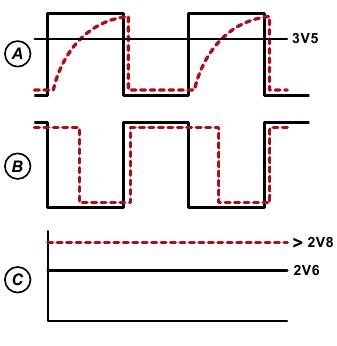
برنج. 2. اسیلوگرام سیگنال ها در نقاط مختلف.
ولتاژ مرجع در نقطه D یک بار با استفاده از تقسیم کننده R4/R5 تنظیم می شود (تغییر مقدار R4). مقدار این ولتاژ به شدت به سطح صفحه سنسور (معمولاً چندین سانتی متر مربع) بستگی دارد. سطح بزرگتر صفحه باعث افزایش ظرفیت خازنی می شود و با این حال ولتاژ در نقطه C در مقایسه با ولتاژ زمانی که صفحات با یکدیگر تماس نداشتند بیشتر خواهد بود. ولتاژ مرجع در نقطه D باید نزدیکتر به 3.4 V تنظیم شود. سنسور لمسی همچنین می تواند با صفحات بزرگ کار کند (به عنوان مثال، کل بدنه را می توان به عنوان سنسور استفاده کرد).
سیگنال خروجی را می توان برای روشن کردن بارهای مختلف استفاده کرد. در بسیاری از موارد توصیه می شود که یک ماشه اشمیت را به خروجی اضافه کنید، به خصوص اگر خروجی به ورودی دیجیتال متصل باشد.
ویم ابویس
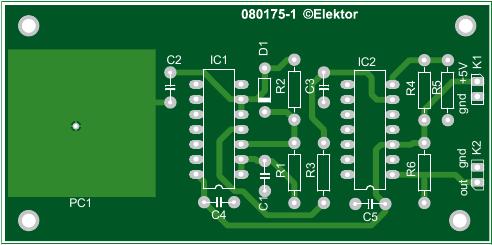
برنج. 4. چیدمان قطعات بر روی برد مدار چاپی.


برنج. 5. برد مدار چاپی.


برنج. 6. برد مدار چاپی (نمای آینه ای).
سنسور خازنی یکی از انواع سنسورهای غیر تماسی است که اصل عملکرد آن بر اساس تغییر در ثابت دی الکتریک محیط بین دو صفحه خازن است. یک صفحه یک مدار حسگر لمسی به شکل صفحه یا سیم فلزی است و دومی یک ماده رسانای الکتریکی است، به عنوان مثال، فلز، آب یا بدن انسان.
هنگام توسعه سیستمی برای روشن کردن خودکار منبع آب به توالت برای یک بیده، استفاده از یک سنسور حضور خازنی و سوئیچ بسیار قابل اعتماد، مقاوم در برابر تغییرات دمای خارجی، رطوبت، گرد و غبار و ولتاژ منبع ضروری شد. همچنین میخواستم نیازی به لمس کنترلهای سیستم را از بین ببرم. الزامات ارائه شده فقط می تواند توسط مدارهای حسگر لمسی که بر اساس اصل تغییر ظرفیت خازنی کار می کنند برآورده شود. من نتوانستم طرح آماده ای پیدا کنم که شرایط لازم را برآورده کند، بنابراین مجبور شدم خودم آن را توسعه دهم.
نتیجه یک حسگر لمسی خازنی جهانی است که نیازی به پیکربندی ندارد و به نزدیک شدن اجسام رسانای الکتریکی، از جمله یک فرد، در فاصله تا 5 سانتی متر پاسخ می دهد. دامنه کاربرد سنسور لمسی پیشنهادی محدود نیست. می توان از آن برای روشن کردن روشنایی، سیستم های هشدار امنیتی، تعیین سطح آب و در بسیاری موارد دیگر استفاده کرد.
نمودارهای مدار الکتریکی
برای کنترل آب در بیدی توالت، دو سنسور لمسی خازنی مورد نیاز بود. یک سنسور باید مستقیماً روی توالت نصب می شد؛ باید سیگنال منطقی صفر را در حضور یک نفر و در غیاب سیگنال منطقی یک تولید می کرد. دومین حسگر خازنی قرار بود به عنوان سوئیچ آب عمل کند و در یکی از دو حالت منطقی باشد.
هنگامی که عقربه به سنسور آورده شد، سنسور باید حالت منطقی را در خروجی تغییر می داد - از حالت یک اولیه به حالت صفر منطقی، زمانی که دست دوباره لمس شد، از حالت صفر به حالت منطقی یک. و به همین ترتیب ad infinitum، تا زمانی که سوئیچ لمسی یک سیگنال فعال کننده صفر منطقی را از سنسور حضور دریافت کند.
مدار حسگر لمسی خازنی
اساس مدار حسگر حضور لمسی خازنی یک ژنراتور پالس مستطیلی اصلی است که مطابق با طرح کلاسیک بر روی دو عنصر منطقی ریزمدار D1.1 و D1.2 ساخته شده است. فرکانس ژنراتور با درجه بندی عناصر R1 و C1 تعیین می شود و حدود 50 کیلوهرتز انتخاب می شود. مقدار فرکانس عملاً هیچ تأثیری بر عملکرد سنسور خازنی ندارد. فرکانس را از 20 به 200 کیلوهرتز تغییر دادم و از نظر ظاهری هیچ تأثیری در عملکرد دستگاه مشاهده نکردم.
از پایه 4 ریز مدار D1.2، یک سیگنال مستطیل شکل از طریق مقاومت R2 به ورودی های 8، 9 ریز مدار D1.3 و از طریق مقاومت متغیر R3 به ورودی های 12،13 D1.4 عرضه می شود. سیگنال به ورودی تراشه D1.3 با تغییر جزئی در شیب جلوی پالس به دلیل سنسور نصب شده که یک تکه سیم یا یک صفحه فلزی است می رسد. در ورودی D1.4، به دلیل خازن C2، جلو برای مدت زمان مورد نیاز برای شارژ مجدد تغییر می کند. به لطف وجود مقاومت اصلاح کننده R3، می توان لبه پالس را در ورودی D1.4 برابر با لبه پالس در ورودی D1.3 تنظیم کرد.
اگر دست یا یک جسم فلزی را به آنتن نزدیک کنید (سنسور لمسی)، ظرفیت ورودی ریزمدار DD1.3 افزایش مییابد و جلوی پالس ورودی نسبت به جلوی پالس به تأخیر میافتد. رسیدن به ورودی DD1.4. برای "گرفتن" این تاخیر، پالس های معکوس به تراشه DD2.1 که یک فلیپ فلاپ D است که به شرح زیر عمل می کند، تغذیه می شود. در امتداد لبه مثبت پالس که به ورودی ریزمدار C می رسد، سیگنالی که در آن لحظه در ورودی D بود به خروجی ماشه منتقل می شود در نتیجه اگر سیگنال در ورودی D تغییر نکند، پالس های ورودی در ورودی شمارش C بر سطح سیگنال خروجی تأثیر نمی گذارد. این خاصیت ماشه D ساخت یک سنسور لمسی خازنی ساده را ممکن کرد.
هنگامی که ظرفیت آنتن، به دلیل نزدیک شدن بدن انسان به آن، در ورودی DD1.3 افزایش می یابد، پالس به تاخیر می افتد و این باعث رفع ماشه D و تغییر حالت خروجی آن می شود. LED HL1 برای نشان دادن وجود ولتاژ تغذیه و LED HL2 برای نشان دادن نزدیکی به سنسور لمسی استفاده می شود.
مدار سوئیچ لمسی
از مدار حسگر لمسی خازنی نیز می توان برای کارکرد سوئیچ لمسی استفاده کرد، اما با کمی تغییر، زیرا نه تنها باید به نزدیک شدن بدن انسان پاسخ دهد، بلکه پس از برداشتن دست نیز در حالت ثابت باقی می ماند. برای حل این مشکل، مجبور شدیم یک ماشه D دیگر به نام DD2.2 را به خروجی حسگر لمسی اضافه کنیم که با استفاده از یک تقسیم کننده به دو مدار متصل شده است.
مدار حسگر خازنی کمی اصلاح شده است. برای حذف آلارم های کاذب، از آنجایی که یک فرد می تواند به آرامی دست خود را بیاورد و بردارد، به دلیل وجود تداخل، سنسور می تواند چندین پالس را به ورودی شمارش D ماشه ارسال کند و الگوریتم عملیاتی مورد نیاز سوئیچ را نقض کند. بنابراین، یک زنجیره RC از عناصر R4 و C5 اضافه شد که برای مدت کوتاهی توانایی تغییر ماشه D را مسدود کرد.
ماشه DD2.2 به همان روش DD2.1 کار می کند، اما سیگنال ورودی D نه از عناصر دیگر، بلکه از خروجی معکوس DD2.2 تامین می شود. در نتیجه، در امتداد لبه مثبت پالس که به ورودی C می رسد، سیگنال در ورودی D به سمت مخالف تغییر می کند. به عنوان مثال، اگر در حالت اولیه یک صفر منطقی در پایه 13 وجود داشت، با یک بار بالا بردن دست خود به سمت سنسور، ماشه تغییر می کند و یک منطقی روی پایه 13 تنظیم می شود. دفعه بعد که با سنسور تعامل کردید، پین 13 دوباره روی صفر منطقی تنظیم می شود.
برای مسدود کردن سوئیچ در غیاب فردی در توالت، یک واحد منطقی از سنسور به ورودی R ارائه می شود (تنظیم صفر در خروجی ماشه، بدون توجه به سیگنال های موجود در سایر ورودی های آن). یک صفر منطقی در خروجی سوئیچ خازنی تنظیم شده است که از طریق مهار به پایه ترانزیستور کلید برای روشن کردن شیر برقی در واحد قدرت و سوئیچینگ عرضه می شود.
مقاومت R6 در صورت عدم وجود سیگنال مسدود کننده از سنسور خازنی در صورت خرابی آن یا شکستن سیم کنترل، ماشه را در ورودی R مسدود می کند و در نتیجه امکان تامین آب خود به خود در بیده را از بین می برد. خازن C6 ورودی R را از تداخل محافظت می کند. LED HL3 برای نشان دادن میزان آب موجود در بیده عمل می کند.
طراحی و جزئیات حسگرهای لمسی خازنی
هنگامی که من شروع به توسعه یک سیستم حسگر برای تامین آب در یک بید کردم، به نظرم سخت ترین کار توسعه یک سنسور اشغال خازنی بود. این به دلیل تعدادی محدودیت نصب و راه اندازی بود. من نمی خواستم سنسور به طور مکانیکی به درب توالت متصل شود، زیرا باید به طور دوره ای برای شستن آن برداشته شود و در ضدعفونی کردن خود توالت دخالتی نداشته باشد. به همین دلیل است که یک ظرف را به عنوان عنصر واکنش انتخاب کردم.
سنسور حضور
بر اساس نمودار منتشر شده در بالا، یک نمونه اولیه ساختم. قطعات حسگر خازنی روی یک برد مدار چاپی مونتاژ می شوند؛ برد در یک جعبه پلاستیکی قرار می گیرد و با یک درب بسته می شود. برای اتصال آنتن، یک کانکتور تک پین در کیس تعبیه شده است؛ یک کانکتور چهار پین RSh2N برای تامین ولتاژ تغذیه و سیگنال نصب شده است. برد مدار چاپی با لحیم کاری با هادی های مسی در عایق فلوئوروپلاستیک به کانکتورها متصل می شود.
سنسور لمسی خازنی روی دو ریز مدار سری KR561 LE5 و TM2 مونتاژ شده است. به جای ریز مدار KR561LE5، می توانید از KR561LA7 استفاده کنید. ریز مدارهای سری 176 و آنالوگ های وارداتی نیز مناسب هستند. مقاومت ها، خازن ها و ال ای دی ها برای هر نوع مناسب هستند. خازن C2، برای عملکرد پایدار سنسور خازنی هنگام کار در شرایط نوسانات زیاد دمای محیط، باید با یک TKE کوچک گرفته شود.
یک سنسور در زیر سکوی توالت تعبیه شده است که سیسترن فلاش در جایی نصب می شود که در صورت نشتی از مخزن، آب نتواند وارد شود. بدنه حسگر با استفاده از نوار دو طرفه به توالت چسبانده شده است.
سنسور آنتن سنسور خازنی یک تکه سیم رشته ای مسی به طول 35 سانتی متر است که با فلوروپلاستیک عایق شده و با نوار شفاف به دیواره بیرونی کاسه توالت یک سانتی متر زیر سطح لیوان چسبانده شده است. سنسور به وضوح در عکس قابل مشاهده است.
برای تنظیم حساسیت سنسور لمسی، پس از نصب آن بر روی توالت، مقاومت مقاومت پیرایش R3 را تغییر دهید تا LED HL2 خاموش شود. بعد، دست خود را روی درب توالت بالای محل سنسور قرار دهید، LED HL2 باید روشن شود، اگر دست خود را بردارید، باید خاموش شود. از آنجایی که ران انسان از نظر جرم بزرگتر از دست است، در حین کار، حسگر لمسی، پس از چنین تنظیمی، تضمین می شود که کار کند.
طراحی و جزئیات سوئیچ لمسی خازنی
مدار سوئیچ لمسی خازنی قطعات بیشتری دارد و برای قرار دادن آنها به محفظه بزرگتری نیاز بود و به دلایل زیبایی ظاهر محفظه ای که سنسور حضور در آن قرار گرفته بود برای نصب در مکانی قابل مشاهده چندان مناسب نبود. پریز دیواری rj-11 برای اتصال تلفن جلب توجه کرد. اندازه مناسبی داشت و ظاهر خوبی داشت. با حذف همه چیز غیر ضروری از سوکت، یک برد مدار چاپی برای یک سوئیچ لمسی خازنی در آن قرار دادم.
برای محکم کردن برد مدار چاپی یک پایه کوتاه در پایه کیس تعبیه شد و یک برد مدار چاپی با قطعات سوئیچ لمسی با استفاده از یک پیچ به آن پیچ شد.
سنسور خازنی با چسباندن یک ورق برنجی به پایین روکش سوکت با چسب Moment ساخته شد و قبلاً پنجره ای را برای LED های موجود در آنها بریده بود. هنگام بستن درب، فنر (که از یک فندک سنگ چخماق گرفته شده است) با ورق برنجی تماس پیدا می کند و بنابراین تماس الکتریکی بین مدار و سنسور را تضمین می کند.
سوئیچ لمسی خازنی با استفاده از یک پیچ خودکار روی دیوار نصب می شود. برای این منظور یک سوراخ در محفظه در نظر گرفته شده است. سپس برد و کانکتور نصب شده و پوشش با چفت محکم می شود.
راه اندازی یک سوئیچ خازنی عملاً با راه اندازی سنسور حضور که در بالا توضیح داده شد تفاوتی ندارد. برای تنظیم آن، باید ولتاژ تغذیه را اعمال کنید و مقاومت را طوری تنظیم کنید که LED HL2 وقتی دستی به سنسور میآید روشن شود و با برداشتن آن خاموش شود. در مرحله بعد، باید سنسور لمسی را فعال کنید و دست خود را به سمت سنسور سوئیچ حرکت دهید و بردارید. LED HL2 باید چشمک بزند و LED قرمز HL3 باید روشن شود. هنگامی که دست برداشته می شود، LED قرمز باید روشن بماند. هنگامی که دوباره دست خود را بالا می آورید یا بدن خود را از سنسور دور می کنید، LED HL3 باید خاموش شود، یعنی منبع آب را در بیده خاموش کنید.
PCB جهانی
سنسورهای خازنی ارائه شده در بالا بر روی بردهای مدار چاپی مونتاژ شده اند، کمی متفاوت از برد مدار چاپی نشان داده شده در عکس زیر. این به دلیل ترکیب هر دو برد مدار چاپی در یک برد جهانی است. اگر یک سوئیچ لمسی مونتاژ می کنید، فقط باید قطعه شماره 2 را برش دهید. اگر یک سنسور حضور لمسی مونتاژ می کنید، آهنگ شماره 1 حذف می شود و همه عناصر نصب نمی شوند.
عناصر لازم برای عملکرد سوئیچ لمسی، اما تداخل در عملکرد سنسور حضور، R4، C5، R6، C6، HL2 و R4، نصب نشده اند. به جای R4 و C6، جامپرهای سیمی لحیم می شوند. زنجیره R4، C5 را می توان رها کرد. تاثیری در کار نخواهد داشت.
در زیر نقشه ای از یک برد مدار چاپی برای خنجر کردن با استفاده از روش حرارتی اعمال آهنگ بر روی فویل آورده شده است.
کافی است طرح را روی کاغذ گلاسه یا کاغذ ردیابی چاپ کنید و قالب برای ساخت برد مدار چاپی آماده است.
عملکرد بدون مشکل سنسورهای خازنی برای سیستم کنترل لمسی برای تامین آب در یک بیده در عمل طی سه سال کار مداوم تایید شده است. هیچ نقصی ثبت نشده است.
با این حال، می خواهم توجه داشته باشم که مدار به نویز ضربه ای قدرتمند حساس است. ایمیلی دریافت کردم که برای تنظیم آن کمک می خواهد. معلوم شد که در حین اشکال زدایی مدار یک آهن لحیم کاری با یک کنترل کننده دمای تریستور در نزدیکی آن وجود دارد. پس از خاموش شدن هویه لحیم کاری مدار شروع به کار کرد.
چنین مورد دیگری نیز وجود داشت. سنسور خازنی در یک لامپ نصب شده بود که به همان خروجی یخچال متصل بود. وقتی روشن شد، چراغ روشن شد و وقتی دوباره خاموش شد. با اتصال لامپ به پریز دیگر مشکل حل شد.
نامه ای در مورد استفاده موفقیت آمیز از مدار حسگر خازنی توصیف شده برای تنظیم سطح آب در یک مخزن ذخیره پلاستیکی دریافت کردم. در قسمت های پایین و بالایی یک سنسور چسبانده شده با سیلیکون وجود داشت که روشن و خاموش شدن پمپ الکتریکی را کنترل می کرد.